Proper: 2 Models discrets Amunt: Taller de modelització medi-ambiental Previ: Esquema
Ja coneixem el concepte d'equació de recurrència i de terme
general. En aquesta unitat volem seguir l'evolució de vàries espècies. Ens
farà falta una variable i una equació de recurrència per a cadascuna. En
general, hi haurà un influència entre espècies i, per aquest motiu, les
equacions de recurrència estaran acoblades
Ens caldrà conèixer el nombre inicial de membres de cada espècie, ![]() i
i
![]() . Introduint aquests nombres a les expressions anteriors i repetint el
procés obtindrem dues sèries
. Introduint aquests nombres a les expressions anteriors i repetint el
procés obtindrem dues sèries
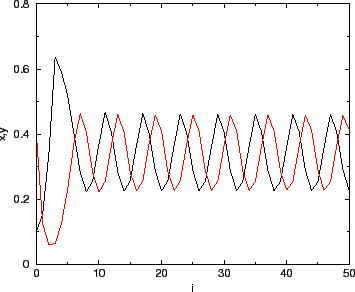
El fet de tenir més d'una variable amplia els tipus de representació gràfica que es poden fer per visualitzar els resultats. Podem continuar representant el valor de les variables en funció del temps (o de l'índex). Aquest tipus de representació ens dóna una bona idea de com evolucionen les espècies amb el temps (veure Fig. 1)
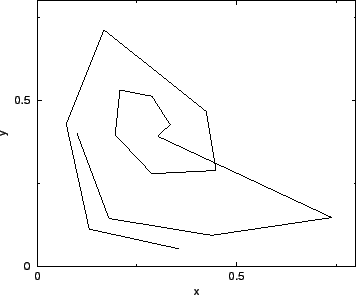
Alternativament, podem construir una sèrie de punts
Un dels avantatges de representar les trajectòries és que resulta aclaridor representar-ne moltes a la mateixa gràfica, amb diferents valors inicials. Si en dibuixem prous, ens podem fer una idea de quina forma tindria una trajectòria que s'iniciés en qualsevol punt de la gràfica (recordem que cada punt representa un estat del sistema). A més, ens pot servir per identificar característiques qualitatives de les solucions, com l'existència de punts fixos, òrbites o atractors.
Un punt fix és un estat del sistema que es pot mantenir indefinidament. La
condició matemàtica en el cas de dues variables és
Detectarem la presència d'un punt fix a una gràfica de trajectòries perquè vàries trajectòries aniran cap a aquest punt (o en sortiran).
Es pot discutir analíticament l'estabilitat del punt fix estudiant els valors
![]() . Aquests valors són les dues solucions del problema de valors
propis
. Aquests valors són les dues solucions del problema de valors
propis
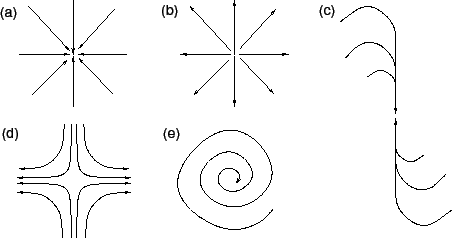
De nou, la generalització a més de dues variables és immediata. No ho és, en canvi, la classificació dels punts fixos en funció de la forma de les trajectòries. Per una banda, tan sols hi ha un tipus de punt fix quan tenim una variable. Per l'altra, apareixen nous tipus a mida que augmentem el nombre de variables.
El motiu és fàcil d'entendre. Quan hi ha una sola variable les trajectòries tan sols es poden acostar al punt fix en una direcció. Si hi ha dues variables, les trajectòries tenen més opcions. Poden acostar-se o allunyar-se en qualsevol direcció. Això és el que es coneix com a node estable (Fig 3a) o node inestable (Fig. 3b). També pot passar que les trajectòries tan sols puguin acostar-se (o allunyar-se) al punt fix en una direcció determinada (Fig. 3c). Llavors es diu que el node és degenerat. Un tipus molt especial de punt fix és el punt de sella (Fig. 3d). Es tracta d'un punt fix estable en unes direccions i inestable en unes altres. Una altra forma d'acostar-se (o allunyar-se) al punt fix és en espiral (Fig. 3e).
En més dimensions apareixen nous tipus de punt fix. Per exemple, en tres dimensions tenim dos tipus diferents de punt de sella.
Aquesta classificació es basa en el comportament d'un conjunt de mesura no nul·la de trajectòries.
Després d'haver repassat el que és un punt fix i quines novetats apareixen en espais de més d'una dimensió, es pot fer l'activitat 1.
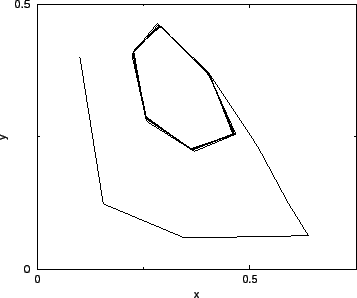
El concepte d'òrbita no canvia gaire respecte a una dimensió. Els mateixos estats del sistema es van repetint al llarg del temps, a partir d'un cert terme (Fig. 4).
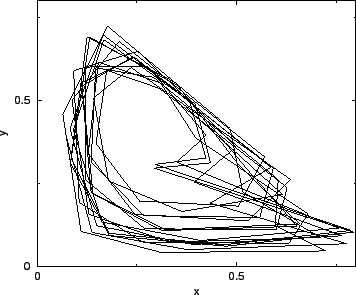
Tampoc és molt diferent el concepte d'atractor. Quan hi ha un atractor, la trajectòria està continguda en una regió de dimensió superior a 1. A la figura 5 podem veure un exemple de trajectòria que forma un atractor.
Taller de simulació medi ambiental